

Har du hørt om pianoflytterens problem? Det baler FFI-forsker Håkon Yssen Rørstad med hver dag. Bortsett fra at det han skal flytte ikke er et piano, men en fem meter lang undervannsfarkost.
Hvorfor er det så vanskelig å flytte et piano? Så sant instrumentet skal fra et rom til et annet er det bare å jekke det opp og trille det av gårde. Men hva hvis pianoet skal opp eller ned ei trapp? Da må du beregne hvordan du skal håndtere et så tungt og kantete objekt gjennom trange trapperom, opp og ned trinn, langs rekkverk og rundt hjørner. Pianoet må ikke komme borti noe. Å miste taket er skjebnesvangert. Og hvordan i all verden skal du beregne alle bevegelsene underveis?
På millimeteren
Profesjonelle flyttefolk får det til. De er trent i å møte mange slags hindringer. Derfor vet de hvordan de må forberede seg på en jobb som, tross pianoets tyngde og størrelse, ofte er presisjonsarbeid på millimeternivå.
– Noe av grunnen til at pianoflytterens problem er så interessant for oss forskere, er at det viser seg å være ekstremt vanskelig å løse det ut fra rene beregninger, sier Håkon Yssen Rørstad.
Han forsker på autonome undervannsfarkoster – AUV-er – ved FFIs avdeling Forsvarssystemer.
Det er ikke pianoer han skal flytte. Det er Hugin. Det er den FFI-utviklede undervannsfarkosten som nå produseres av Kongsberg. Hugin er en oransje, torpedoliknende maskin på 800 kilo. Den er i stand til å nå store havdyp. Den kan sonar-skanne omgivelsene i detalj. Men den har ingen annen styrmann enn seg selv. Altså må Hugin på en eller annen måte trenes opp.
Hugin
- Hugin er en autonom undervannsfarkost (Autonomous Underwater Vehicle, AUV). Den kommer i flere utgaver og størrelser, foreløpig fra 5,2 til 6,4 meters lengde og med en vekt på inntil 1,5 tonn. Hugin kan operere på egen hånd ned til 6000 meters dyp, uten fysisk forbindelse til en båt eller fjernkontroll fra overflaten.
- Hugin («Tanken») og Munin («Minnet») er Odins to ravner, som hver dag bringer ham nyheter fra hele gudeverdenen.
- Navnet på farkosten er samtidig en forkortelse: High-precision Untethered Geosurvey and INspection system.
- Utviklingen startet ved FFI på 1990-tallet, med blant annet Statoil og Simrad (nå Kongsberg Maritime) på laget. Målet var å utvikle en kabelfri undervannsfarkost for detaljert sjøbunnskartlegging på dypt vann.
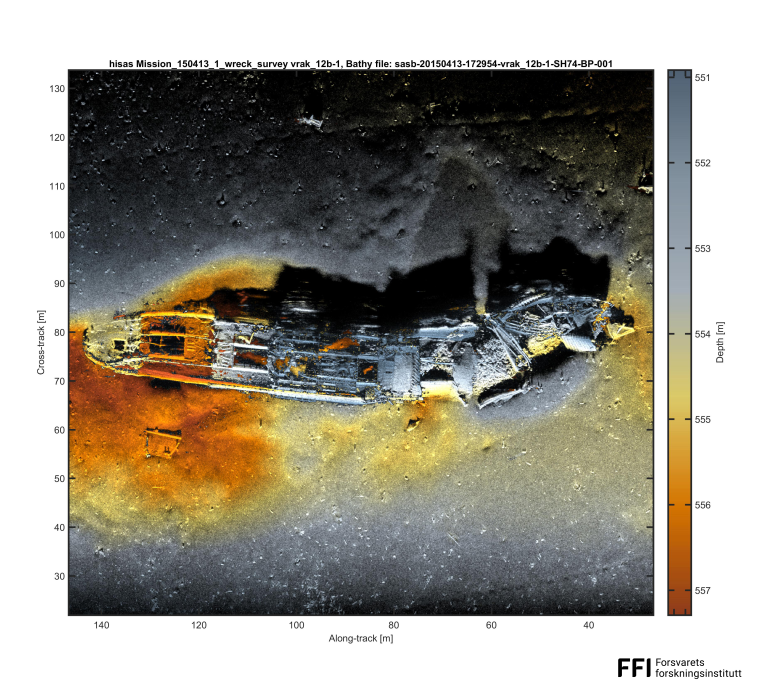
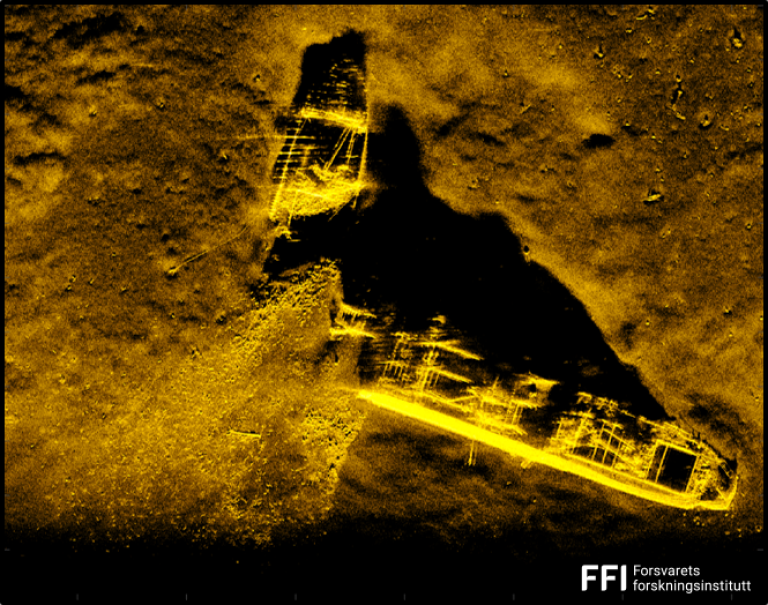
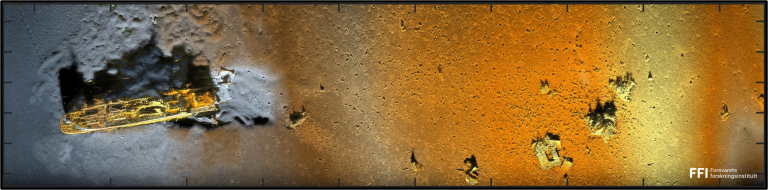
- AUV-en har avanserte sonarer og ekkolodd. Ved hjelp av Hugin kan det lages sonaravbildninger som til slutt framstår som detaljerte fotografier. Bildet «tas» med undervannsmikrofoner – hydrofoner. De ser motivet fra bare én retning. Derfor får vi skygger. Tusenvis av opptak inngår i et slik bilde. Hver måling kan sammenlignes med å bruke en lommelykt i stummende mørke. Alle dataene settes så sammen med millimeterpresisjon. Slik oppstår et bilde med høy oppløsning og skarp havbunn.
- Hugin er blant mye annet blitt brukt for å dokumentere krigsetterlatenskaper på havbunnen.
- Hugin produseres og selges av Kongsberg Discovery. Teknologien utvikles stadig.
![]()
Hugin og Earhart
Denne farkosten er i utgangspunktet en svært vellykket konstruksjon, godt kjent på det internasjonale markedet og med mange eksemplarer i flittig bruk. I februar 2024 kom nyheten om at en Hugin var sentral i det som kan være funnet av Amelia Earharts tomotors Lockheed Electra. Den allerede da verdensberømte flygeren forsvant under et forsøk på å fly jorda rundt i 1937. Det førte til datidas største leteaksjon, som var resultatløs.
Det som likner på et slik fly er nå blitt avbildet av en Hugin, tilhørende selskapet Deep Sea Vision. Objektet de fant ligger på nesten 5000 meters dyp i Stillehavet. Funnet ble gjort nær Howlandøya, midt mellom Australia og Hawaii. Nye søk må til før de er helt sikre på hva som ligger på havbunnen. I og med at omrisset av et fly er så pass tydelig på sonaropptaket, er en teori at Earhart og navigatøren greide å nødlande på vannet. Deretter har flyet sunket, uten å gå i oppløsning.
Kollisjoner, nei takk
Den krevende og risikofulle delen er når Hugin skal veldig nær bunnen. Operatøren må være like påpasselig som en pianoflytter: Harde sammenstøt er svært lite ønskelig.
– Hvis vi skal holde oss til sammenlikningen: Her er det snakk om et bakhjulsdrevet, eller rettere sagt propelldrevet, instrument som ikke kan stoppe. I en fart på to meter i sekundet skal Hugin styre seg selv, sier Rørstad.
– AUV-en bør unngå enhver hindring som kan føre til skader eller havari. Operatøren – pianoflytteren, altså – sitter i et fartøy på overflaten. Kommunikasjon under vann er vanskelig. Han kan derfor bare forhåndsprogrammere hva Hugin skal gjøre. Den kan ikke styres i sanntid, forklarer Rørstad.
Som en gressklipper
I praksis fungerer dette likevel bra. I åpent farvann og i god avstand fra havbunnen kan Hugin for eksempel programmeres til å bevege seg i et gressklippermønster. Slik kan den gå autonomt i opptil et døgn. Skulle den oppdage en hindring foran seg vil den sette snuten oppover.
Rørstad forklarer at slike tokt er godt planlagt på forhånd.
– En støter sjelden på vanskeligheter. Men hva hvis vi skal nærmere land, eller nærmere bunnen enn de 20 meterne som er vanlig under kartlegging? Vi kjører allerede i dag ned til tre meters flyvehøyde for å ta bilder med kamera. Det kan for eksempel være aktuelt ved minesøk. Vi har bare lyst til å gjøre dette med mindre risiko. Da må Hugin selv i mye større grad ha evne til å både se og løse problemene som oppstår. Den bør ikke bare stikke opp til overflaten når en hindring viser seg.
Mer selvkjøring
Her er vi tilbake ved beregningene Rørstad gjør. Han og kollegene ved FFI prøver ut ulike tilnærminger. Alle har som mål om å gjøre autonome undervannsfarkoster enda mer selvkjørende, sier han:
– Hvordan kan en slik maskin gjenkjenne en stein, skille mellom en mine og et oljefat, svinge utenom en hindring eller bevege seg så tett på bunnen at den på nært hold kan fotografere objekter av interesse? I norske farvann er sikten som regel veldig dårlig på bare noen få meters avstand. Dagens Hugin kan lage kjempegode bilder basert på sonarteknologi, men vi har som mål å komme lenger enn det.
Kartlegger raskt
– En Hugin koster mange millioner. Samtidig finnes det undervannsdroner som gir fine undervannsbilder, og som du kan kjøpe i butikken?
– Det er riktig. Til sitt bruk er de enkle dronene helt prima. Men her er behovet et annet: Hugin gjør det mulig å kartlegge store arealer under vann på svært kort tid. Både Forsvaret og andre ønsker seg en AUV som farefritt kan manøvrere enda nærmere interessante objekter enn hva dagens teknologi tillater.
Kostbare sekunder
På Oceans-konferansen i USA i fjor høst presenterte Rørstad en artikkel om bevegelsesplanlegging for undervannsroboter. Her deler han og medforskerne inn de tekniske mulighetene for egenstyring av AUV-er i fem kategorier.
– Alle tilnærmingene har sine fordeler og ulemper. Ingen av dem er optimale. En perfekt algoritme vil rett og slett bruke for mye prosesseringstid. Tid du ikke har når farkosten er på vei mot en fjellvegg. En god metode må derfor balansere prosesseringen underveis mot kvaliteten på manøvreringen. Samtidig må resultatet ikke ta oss rett inn på en ny kollisjonskurs. Vi vil jo helst ikke havarere.
30 år uten tap
Sensorene og batterikapasiteten på Hugin er allerede av høy kvalitet. De nye og mer avanserte algoritmene som FFI-forskerne utvikler kan gi Hugin enda høyere ytelser og mer autonomi. Også AI-verktøy er inne i bildet her.
Mye lar seg løse via dataskjermen, men langt fra alt. Forskerne ved FFI drar gjerne ut for å sjekke nye løsninger på FFIs egen Hugin.
– Vi gjør jevnlige tester med den i Oslofjorden, forteller Rørstad.
– Er dere like forsiktige som flyttebyråer?
– Ikke alltid, dessverre. Det hender det blir små kræsj av ulike slag. Vi forskere pleier å si det slik: Ny og viktig erfaring er direkte proporsjonal med ødelagt utstyr. På det punktet er proffe pianoflyttere neppe enig med oss. På den andre siden: Selv om vi tar en risiko med å kjøre Hugin på ny og eksperimentell programvare har vi ganske fyldige sikkerhetsprosedyrer, og tett overvåking under testene. Vi har ennå ikke mistet en farkost, selv om vi har kjørt ulike utgaver av Hugin i snart 30 år.
Search and monitoring of shipwreck and munitions dumpsites using HUGIN AUV with synthetic aperture sonar – technology study
Roy Edgar Hansen, Petter Lågstad, Torstein Olsmo Sæbø
Change detection on shipwrecks using synthetic aperture sonar – North Sea Wrecks Task 3.5 Deep Water Case Study
Av Lars Aarønæs
